Week Review 11/30/2023
Working on Float Electronics
This week I primarily worked on the electronics for the float. We are now on track with the goals for the electronics.
PCB
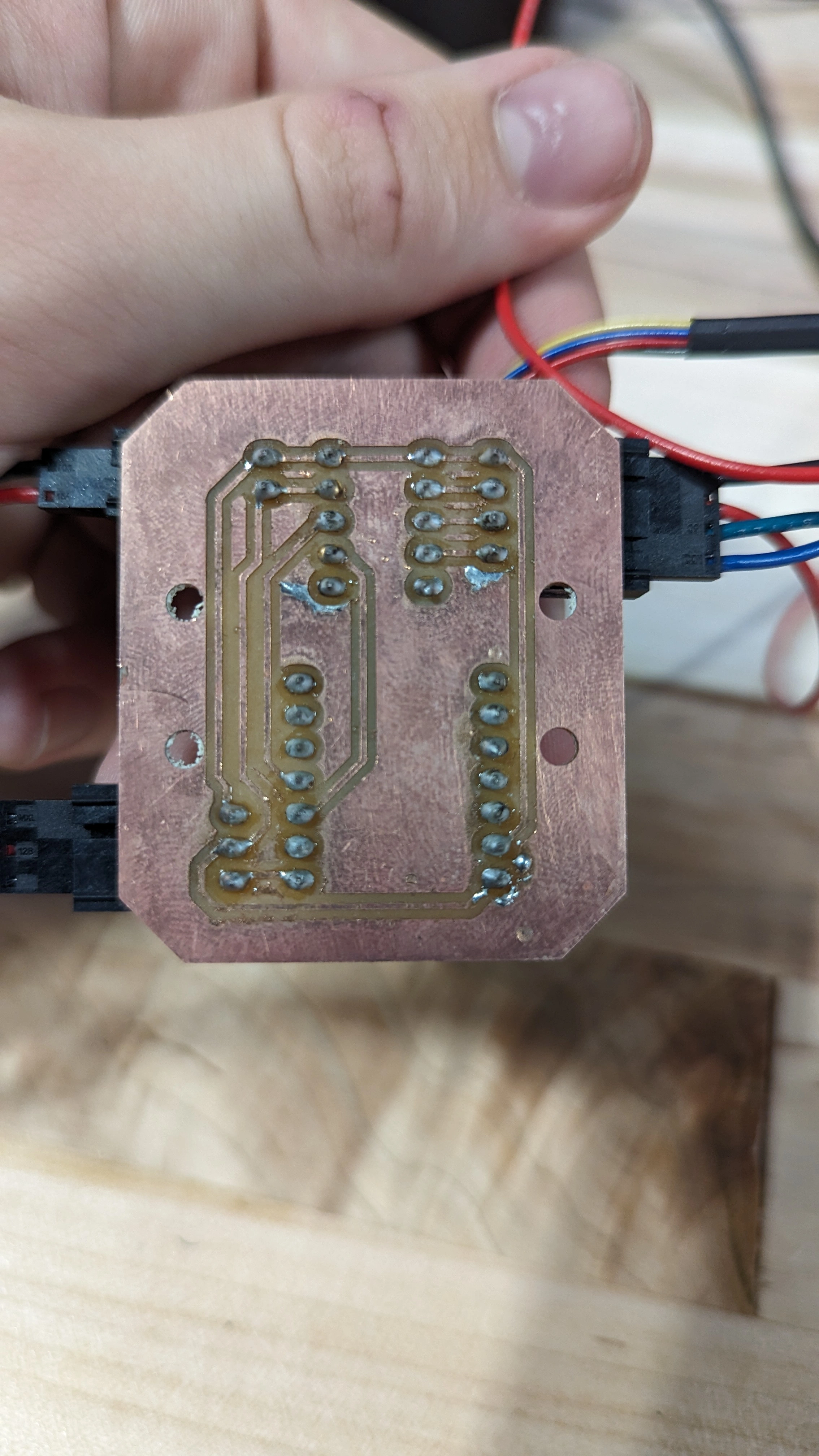
Franklin and I went though a few iterations of the PCB, and we arrived at a design that works. We are using polarized snap-in connectors for all the electrical connections in the float. Last year one of the most common failures was caused by connectors coming apart, and this is intended to fix that issue.
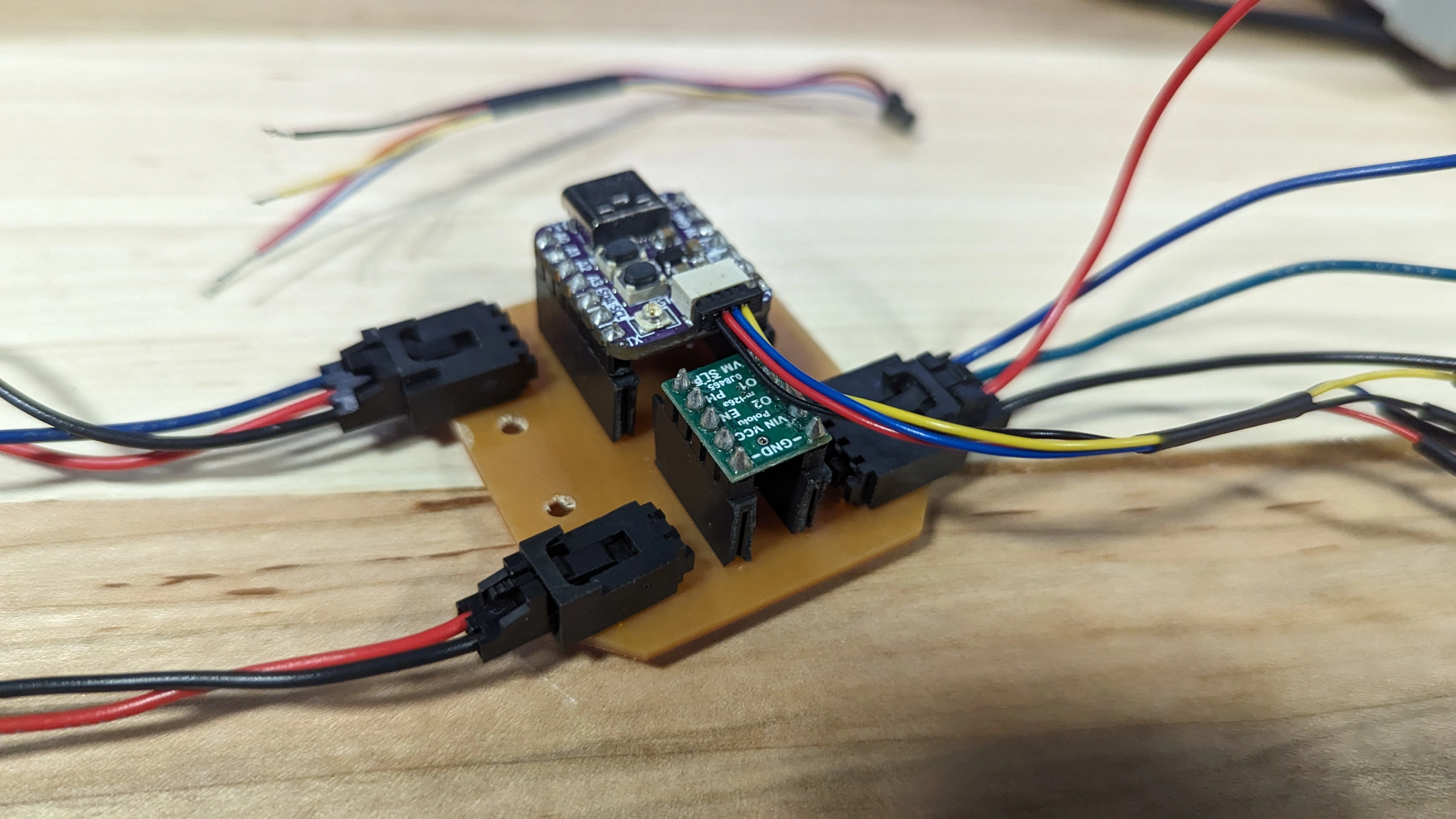
One of the biggest unknowns with the electronic design is whether the board is actually using the external antenna or not when you plug one in. I made a post to the Adafruit Forums but I have not gotten any responses yet.
Testing
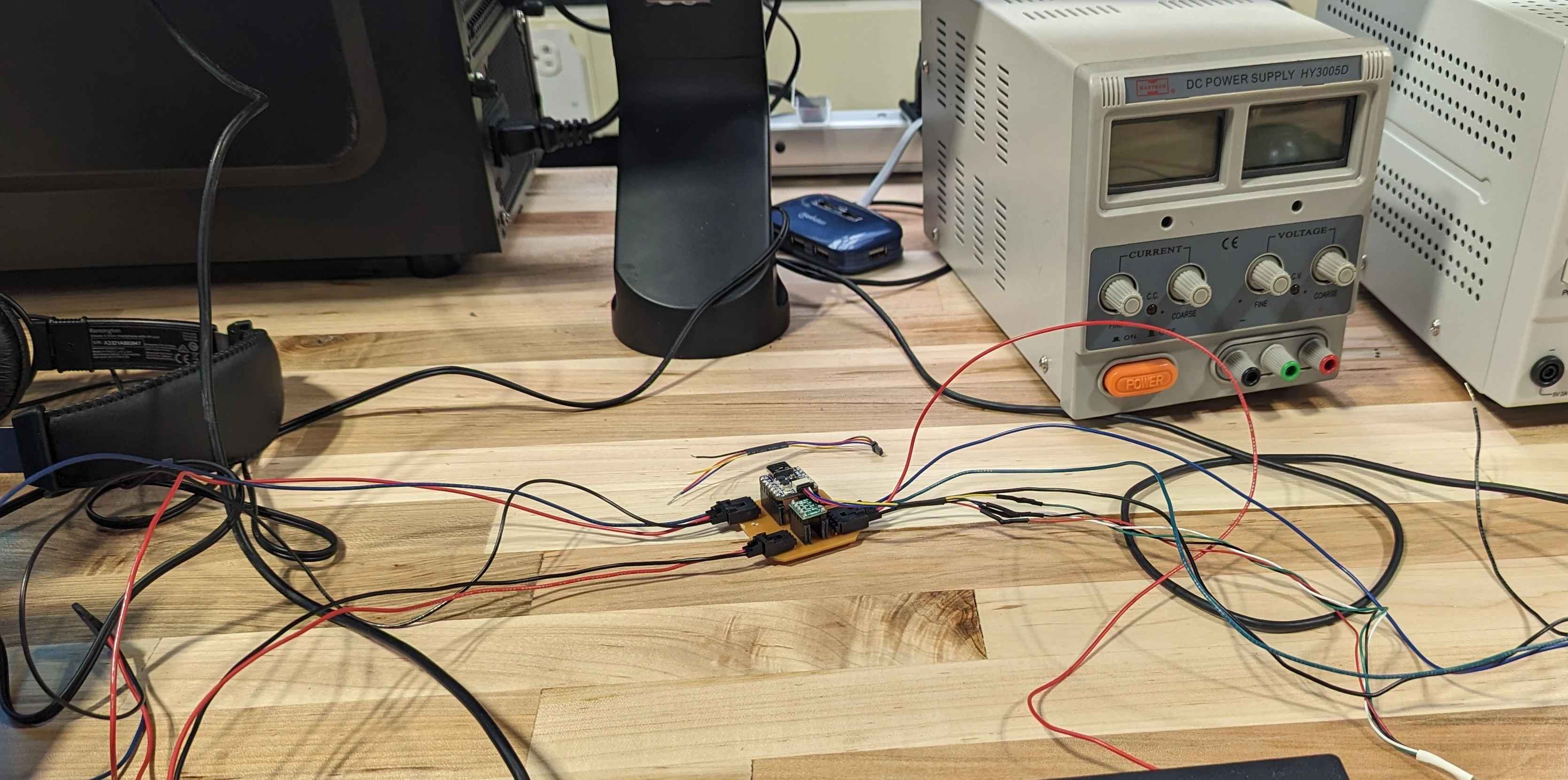
After I soldered the board I tested it by connecting everything with a motor. I had to use two power supplies to do this, one for powering the logic and one for powering the motor. On the float’s battery pack we will tap the voltage at two points when connecting batteries in series.
Working on Float Seal
The piston seal is one of the most complicated parts to design on the float. The root of our problem with the piston seal is that the acrylic tube is not a perfect circle, and different areas of the tube are more or less circular.
Last year when we designed the piston we used rapid iteration to make it rather than math. We did this by cutting many cardboard approximations of the seal the laser cutter, and seeing how they fit. Eventually we arrived at a design that worked well enough to get us through last year.
This year we want to be much more precise. We calculated the optimal dimensions for the O-Ring seal, but those do not work because of the issue with precision in acrylic tubes.
Robotics Team Organization
For the past few years we had been using a combination of Discord and Google Sheets for organizing the robotics team. Although this certainly worked, it was not nearly as efficient as it could be.
This year we are switching to using notion, which is a task management platform. I was skeptical at first, but so far it has worked very well.