Week Review 11/9/2023
Introduction
This was a very short week, we had a voting day and Veterans Day, so I could only do two days of work this week.
Finishing Breadboard
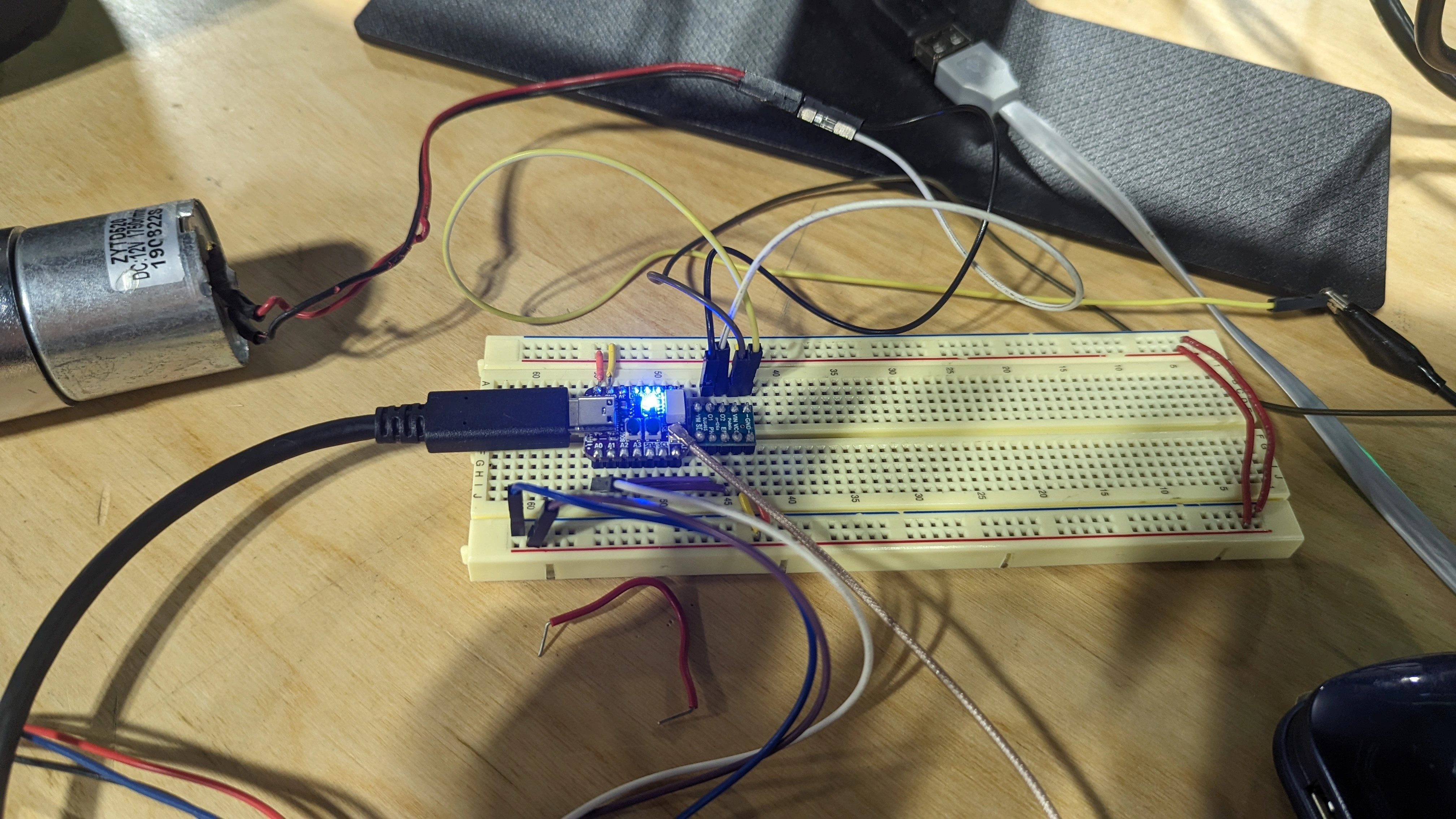
In order to make sure everything is working I wanted to test the breadboard with every component on it. I put the hall effect sensor, microcontroller, motor driver, and the motor. Everything worked as expected with the code.
Setting Up Indicator Lights
One of the design elements we wanted to add for both the LED and float are hardware indicators for everything. Thankfully the Adafruit Py QT has a Neopixel enabled LED on it. This allows you to set them any color using a nice library.
I made different colors for different states the float could be in. Below is a table of what each indicator light means.
| LED Color | Meaning |
|---|---|
| Blinking Red | Hall effect timeout |
| Blue | Awaiting communication |
| Green | Received communicating |
| Purple | Doing profile |
Documenting Code
The firmware for the float is nearing completion so I wrote some detailed documentation on it so that future members of the robotics team can work on it.
The documentation can be found here.
Starting PCB Schematic
I have not made a PCB before, so it has been a little bit slow moving. Adafruit posted some schematics for eagle, this is very helpful as I don’t have to lay out pads manually.