Week Review 12/14/2023
Depth Sensor
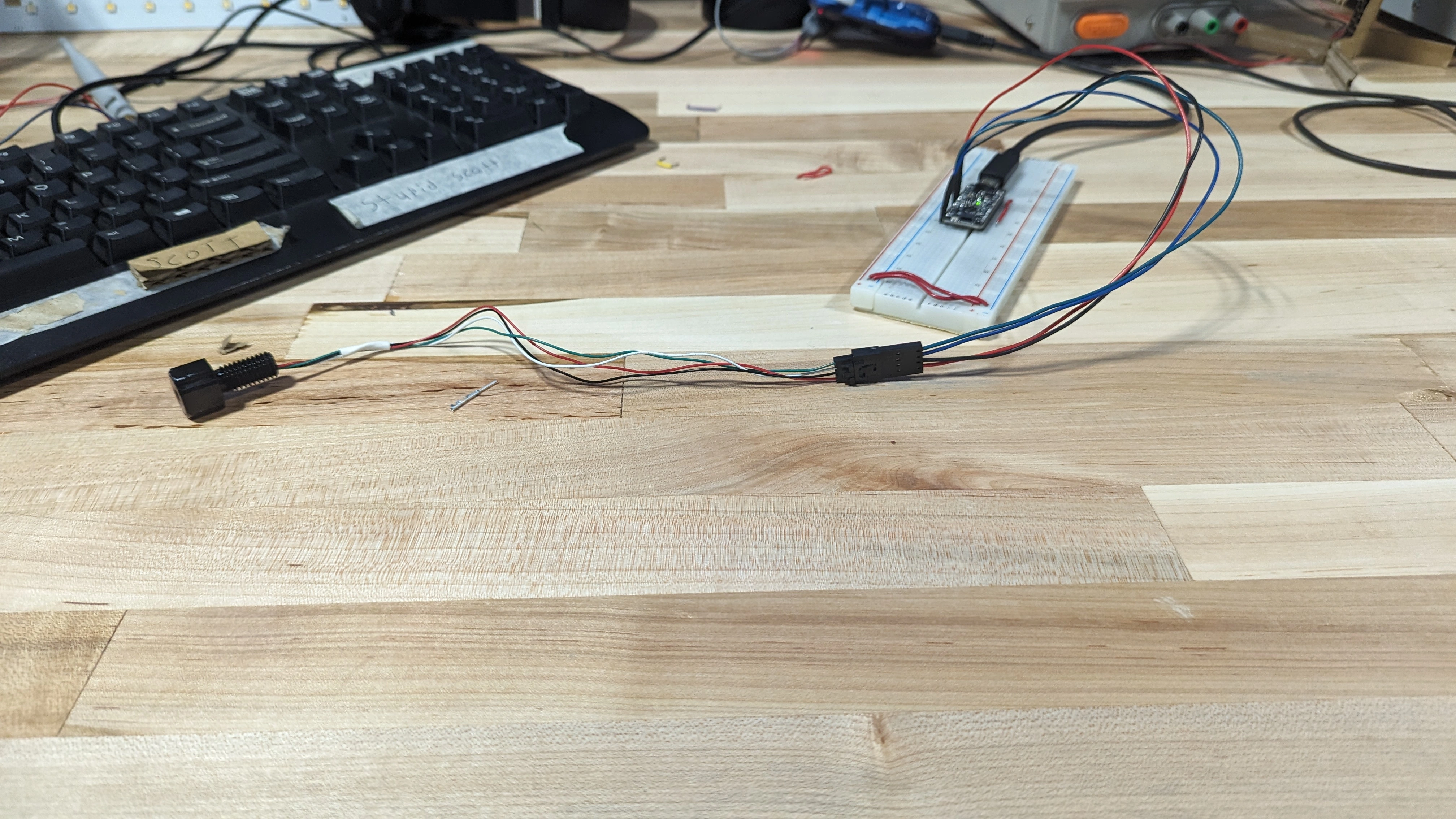
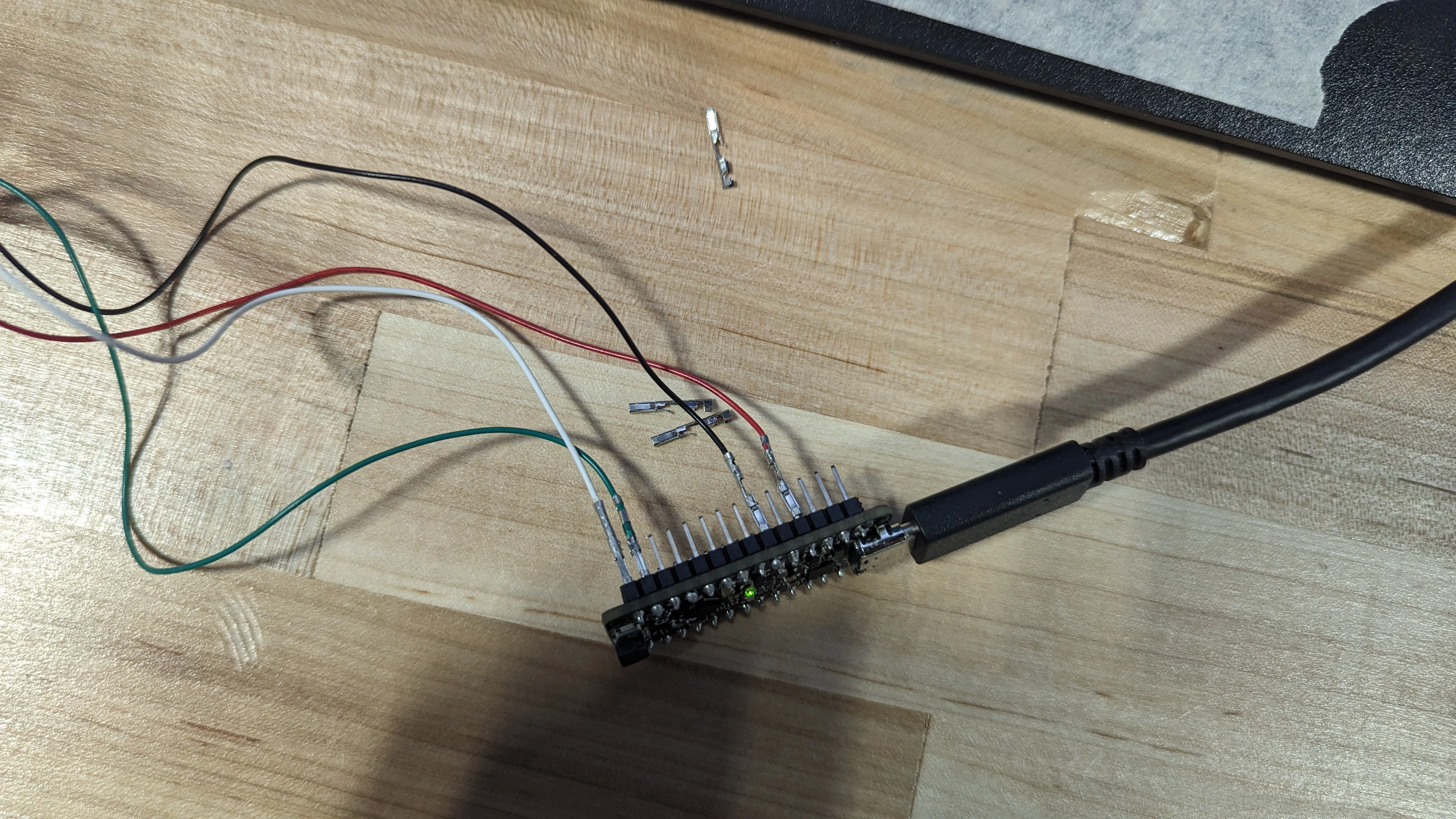
Last week I emailed BlueRobotics about the problems I have been having with the depth sensor. The depth sensor is returning consistent garbage to the microcontroller. Support got back to me, they asked for close up pictures of the way I had the sensor set up.
After sending them pictures of my setup, they said that I2C connections are not supposed to be as long as I had it. They suggested connecting the depth sensor directly to the microcontroller as a troubleshooting step. Unfortunately it continued to give the same output when connected directly. They asked me to send the depth sensor to them so they could do in house diagnostics on it.
Overall the support experience with BlueRobotics so far has been wonderful. When they were asking for pictures of the setup, I thought they were trying to weasel out of the warranty, but they were actually using the pictures to give useful support.
Float Antenna
The float needs an external antenna that sticks out of the top of the float in order to communicate with the surface. We are using WiFi because it is well supported, unfortunately it uses 2.4GHz which is well absorbed by water.
Connecting the antenna has been a challenge. Most WiFi antennas are not intended to be completely submerged underwater for extended periods of time. We have some antennas from an old router that we are planning on using.
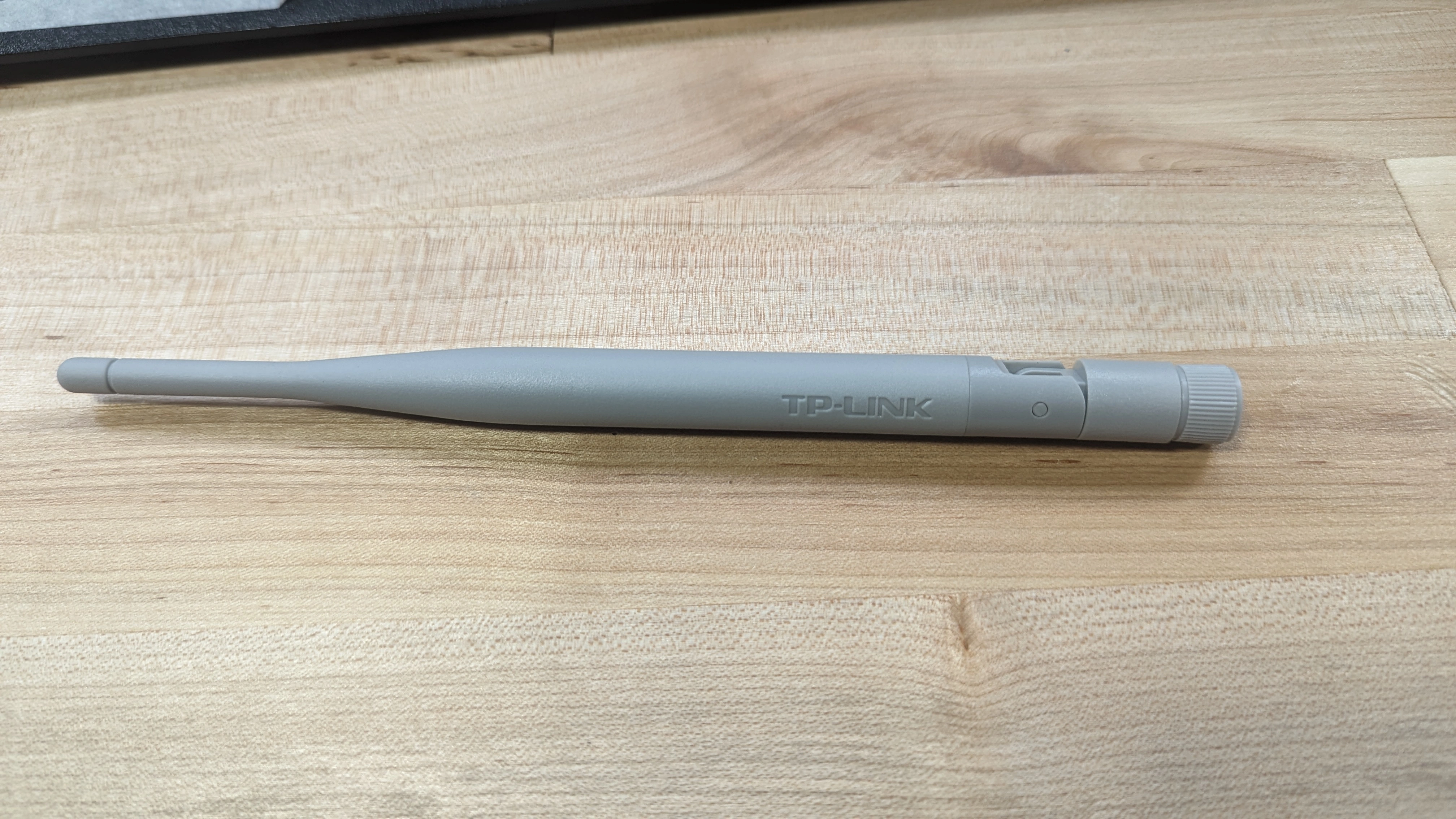
We are going to caste the part of the antenna that has openings in epoxy to stop it from taking on water. We are making an attempt to preserve the athletics of the float. We do not want to have a large messy stick coming out of the top of an otherwise aesthetically pleasing robot.
Looking Forward
We a little bit behind schedule with the float, but we purposely set a very aggressive schedule. Our main bottleneck is the shipping times for components. We need a very large piece of metal stock in order to turn a new seal, and we need to replacement depth sensor.
I am optimistic that we will have a prototype by the end of January. Most of the work on the last float was after the prototype, but I think we learned out lessons from last year. We designed the float with actual numbers in mind this year rather than false assumptions.
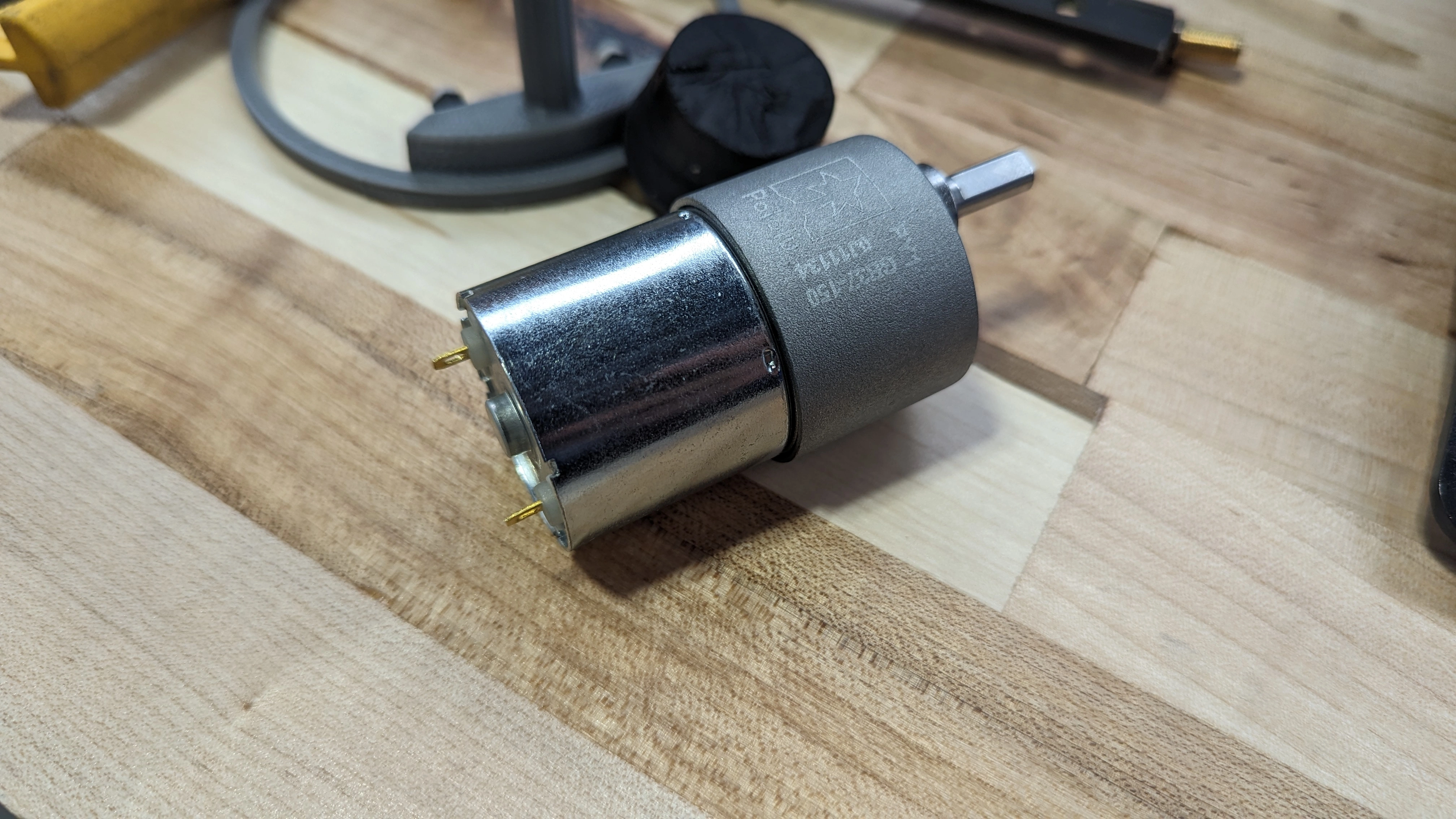
An example of this is we are using a motor that we calculated to be strong enough to push the piston underwater.