Week Review 12/21/2023
Float Progress
This week my progress was a slightly hampered because I was not able to work on the depth sensor. I believe the previous depth sensor was dead-on-arrival, but I do not want to try using the new depth sensor until I am sure that I was not the culprit.
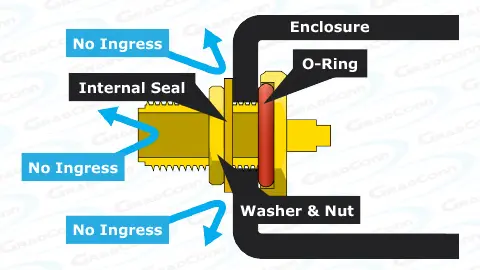
I focused on making a waterproof bulkhead for the antenna this week rather than working on the depth sensor. Mr. Christy showed me how he sometimes seals things using two nylon washers on either side of the panel they are mounted to.
Testing Seal
I want to use the sealing strategy using two nylon washers, but I need to test this at depth so I know it won’t leak.
I was thinking of different ways I could do this, and I decided one of the most cheap and effective ways would be using a plastic water bottle. I am mounting the bulkhead to the cap of the water bottle.
I am planning on putting weights in the water bottle and sinking it somewhere with a string attached. After waiting a few minutes I will pull it back up and see if any water got in. Hopefully this will stay sealed, and it will provide a simple and easy way to attach the antenna.
Writing Documentation
Historically the robotics team has lacked initiative to write documentation until the last minute. This year we have been changing that, and writing documentation as we go. In the beginning of this week I spent some time writing fairily extensive documentation that we will put on the website later.
The documentation still needs to be edited by Zack Bertocchi, who does the marketing for the team, but I wrote the general content. The new Sunk Robotics site is not up yet, so I posted the documentation rough draft here.
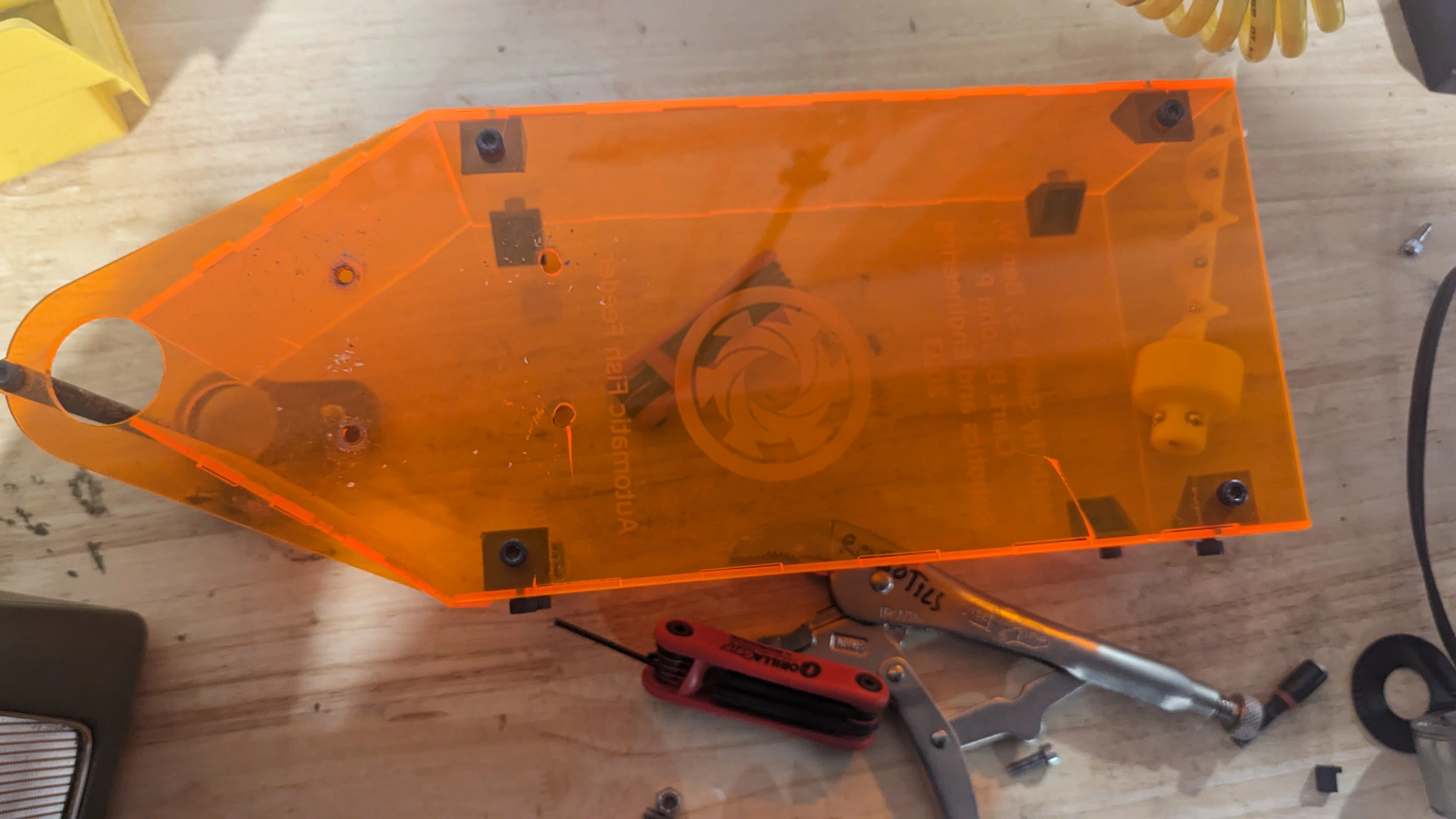
Fish Feeder Repair
The Robotics Shop made a fish feeder for the Biotech lab in our school a few years ago. This has been an interesting project and case study in our shop on stability. This is a critical component of their lab, and needs to constantly work.
Recently this fish feeder has had some problems, they were fixed a few months ago by Ben, Sasha, and Joao. Unfortunately the fish feeder was accidentally knocked over by a student in Biotech which caused significant damage.
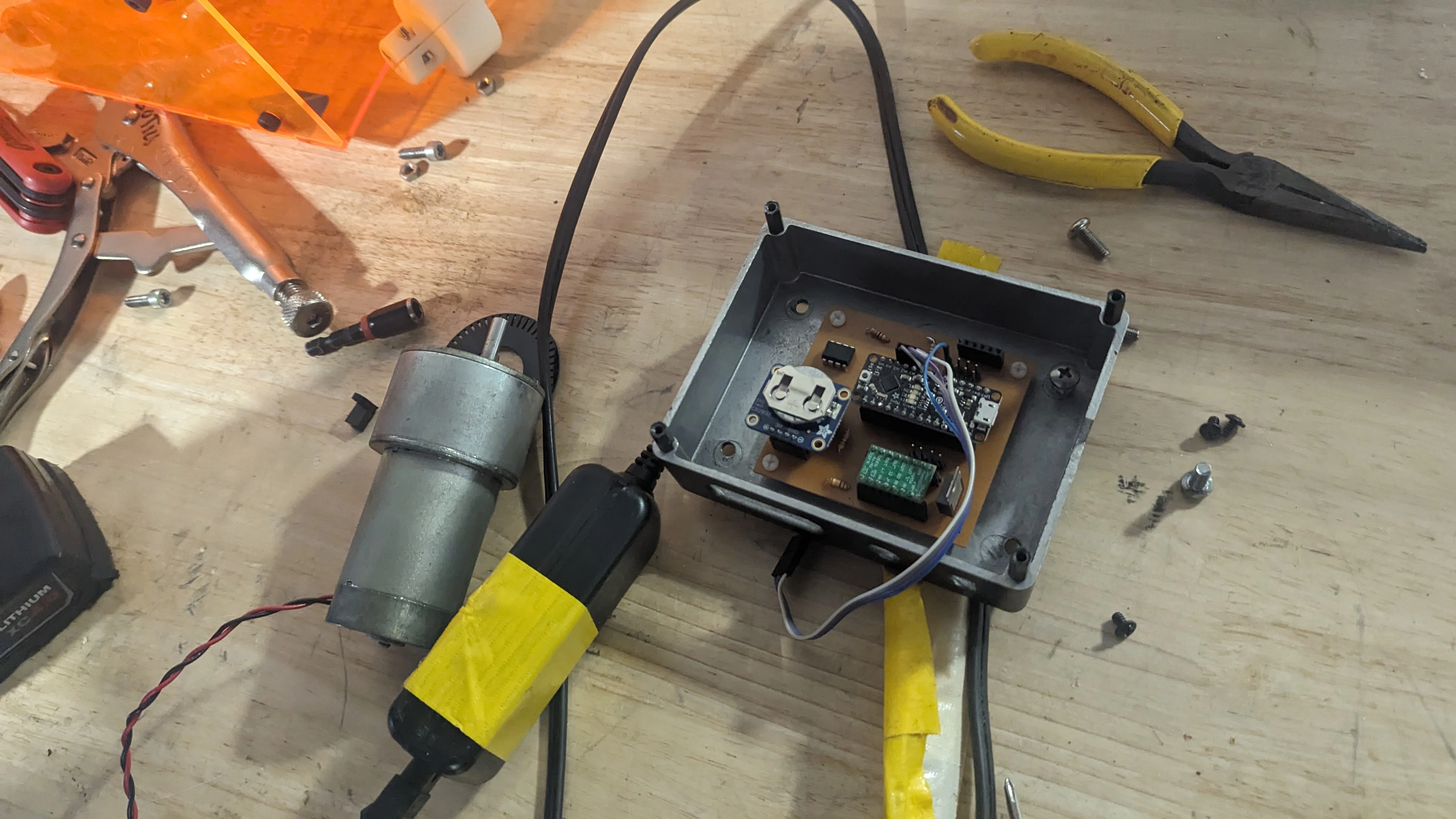
Disassembling
We first took the electronics enclosure off, then took the hopper full of fish food off. Taking the hopper out proved difficult because when it was assembled originally lock nuts were used.
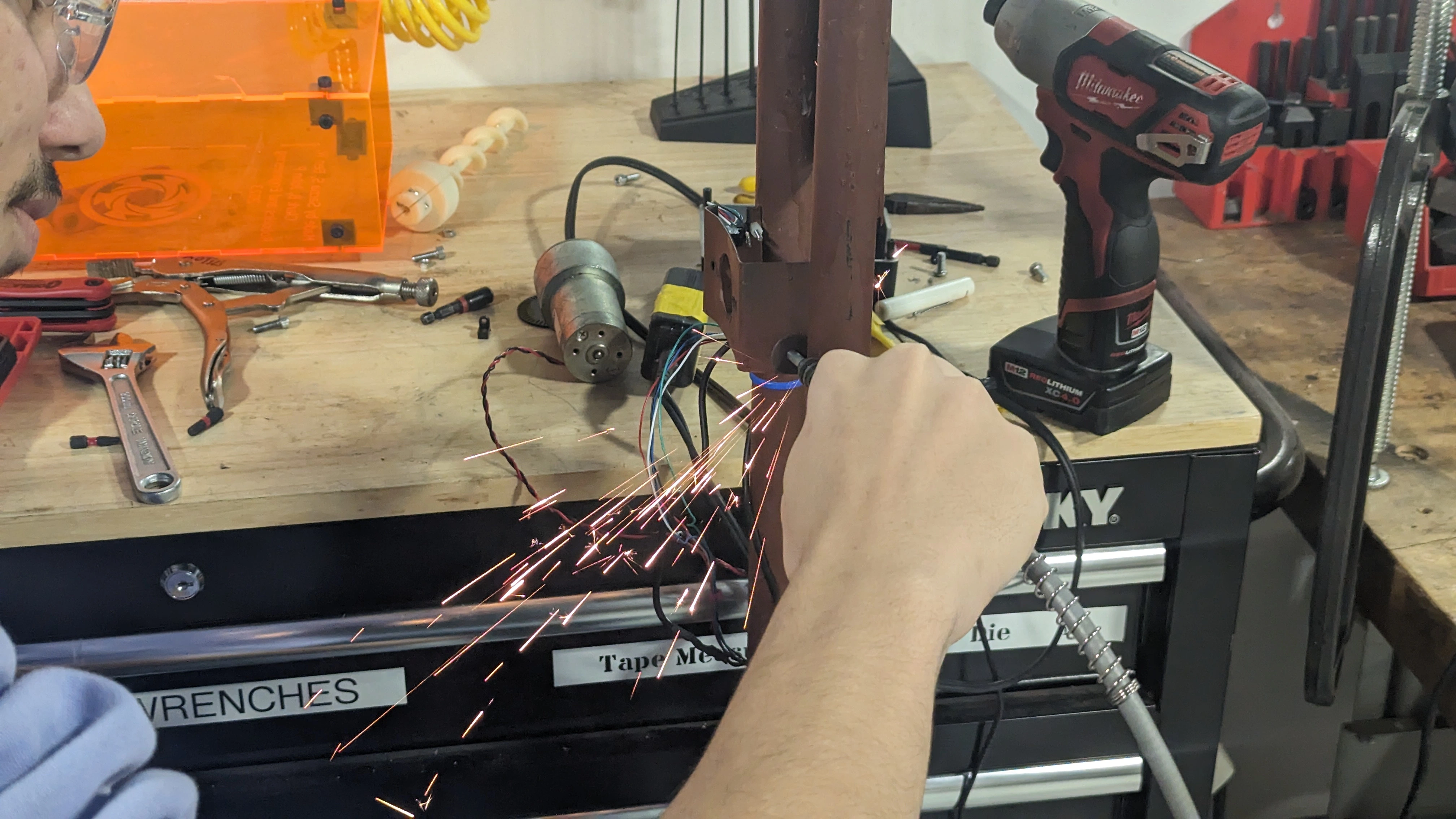
The frame was damaged in a way that prevented the fish feeder from being taken apart in the way it was intended. Bent metal got in the way of screws making it necessary to cut the metal apart.
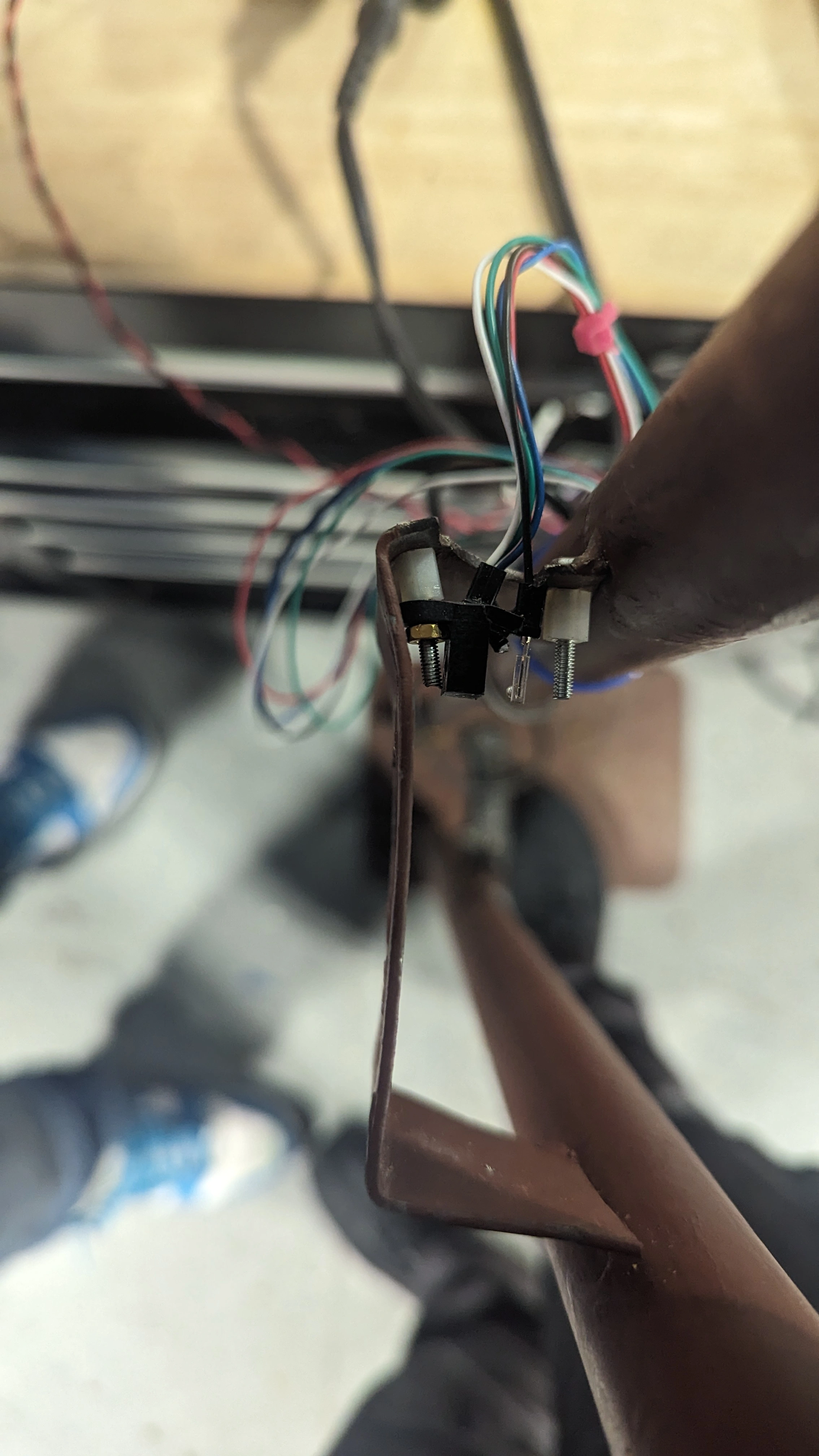
Motor Encoder
The motor has a in-house made encoder on it. There is a laser-cut disk with slits in it for a line-break sensor, the slits are evenly spaced, so with simple math exactly how far the motor has rotated can be determined.
As a fail safe, when the microcontroller does not get any output from the line break sensor it will shut down the fish feeder. This prevents the fail condition where the fish feeder dumps the whole contents of the hopper into the tank.
Unfortunately the line-break sensor was completely smashed during the fall. We do not have any more of the line break sensors used originally, so I need to retrofit the circuitry to use a different line break sensor.
Joao designed a new mounting arrangement for the electronics that will hopefully be more impact resistant.