Week Review 11/17/2023
Float
I started this week by working on the float. I am trying to catch up on the deadlines from October. The deadlines were intentionally very aggressive so we were expecting to be a little bit behind schedule.
I succeeded in catching up to the October goals on the electronics and software side, and I think I will be able to meet the November goals.
You can find the self-imposed deadlines for different elements of the float here.
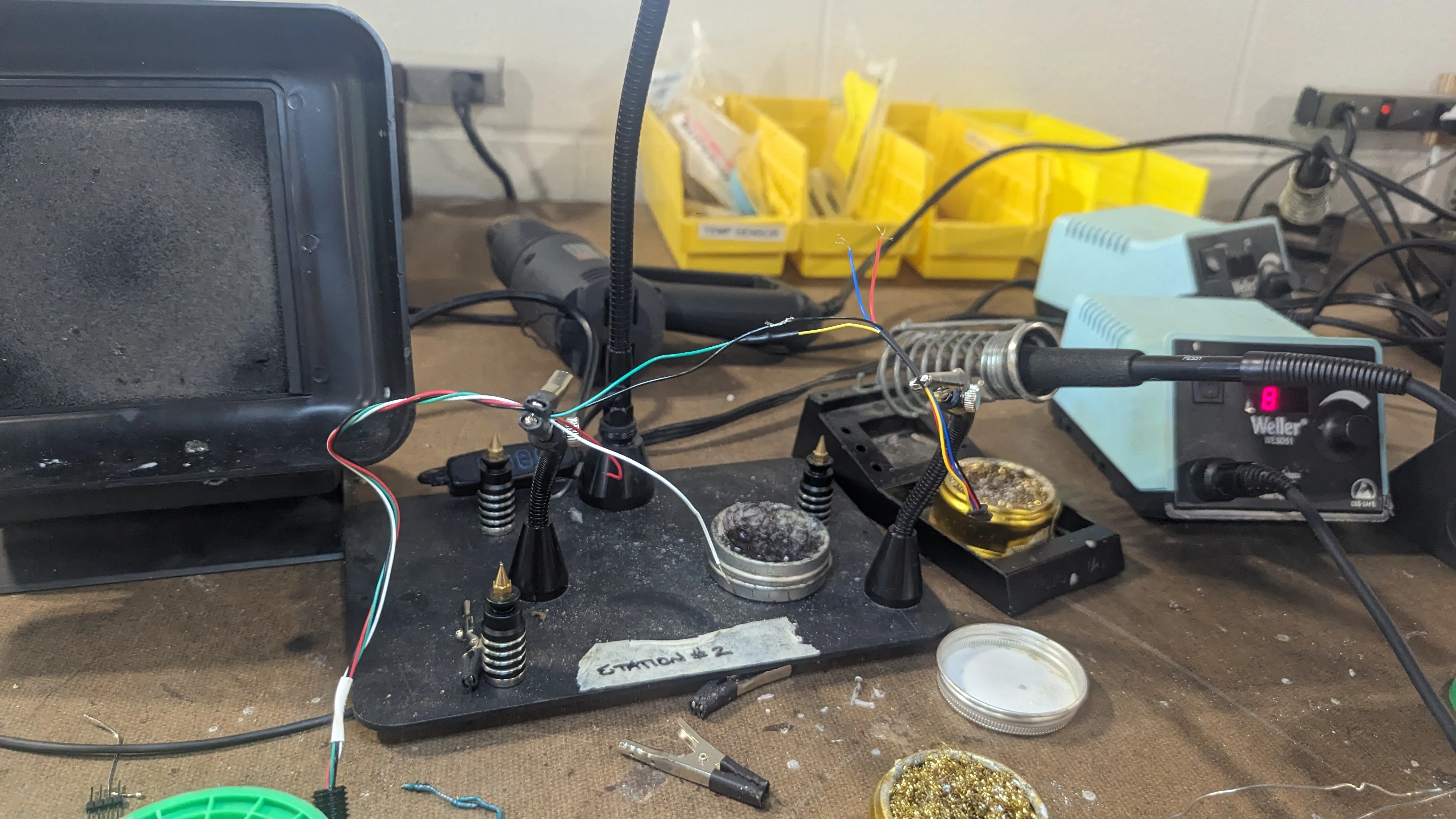
Soldiering Depth Sensor
The correct JST connectors finally arrived to let me plug the depth sensor directly into the Adafruit Py QT. I soldered Power, Ground, SDA, and SCL together from the prewired cables to the new JST connector and heat shrinked them together. This was a fairly quick process and I now just need to write the depth sensor code.
Writing Topside Client
One of the goals for October was having the topside client finished. I was able to finish it this week, I wrote it in Python. I am using the Python Websockets library, and I made the user interface similar to the example client you get when you run python3 -m websockets.
I used mattplot lib to graph depth data. I am getting the depth data by converting a string of it into an array with some basic manipulation.

As it stands right now the topside client is ready for the regional competition.
Getting Robot Ready for MITRE
The robotics team is going to the grand opening of the pool at MITRE. We are trying to get the new JONA ROV ready for a demonstration. As I am writing this blog post it is not clear whether it will be ready or not. Towards the end of the week I temporarily stopped working on the float and moved to the ROV.

Making Tether
We needed to have a tether to power and communicate with the ROV. We bought ultra-high strand wire to make the tether out of, this type of wire is much more flexible than solid core, making our ROV more maneuverable. We did not have ultra-flexible CAT-8 cable so we used solid core, that we will be replacing once we can by a more flexible alternative.
To crate the tether I laid all the wires out in a straight line in a long hallway and zip tied the three cables together. In the future we are hoping to find some sort of flexible buoyant mesh that we can surround the cables with.
Installing Motor Shrouds
I had to redo all the WetLink perpetrators so that I could route the cables through the new motor shrouds. This is because of a design flaw in our motor shrouds, but we did not have time to fix this before MITRE.