Week Review 9/22/2023
Continued Work on Communication
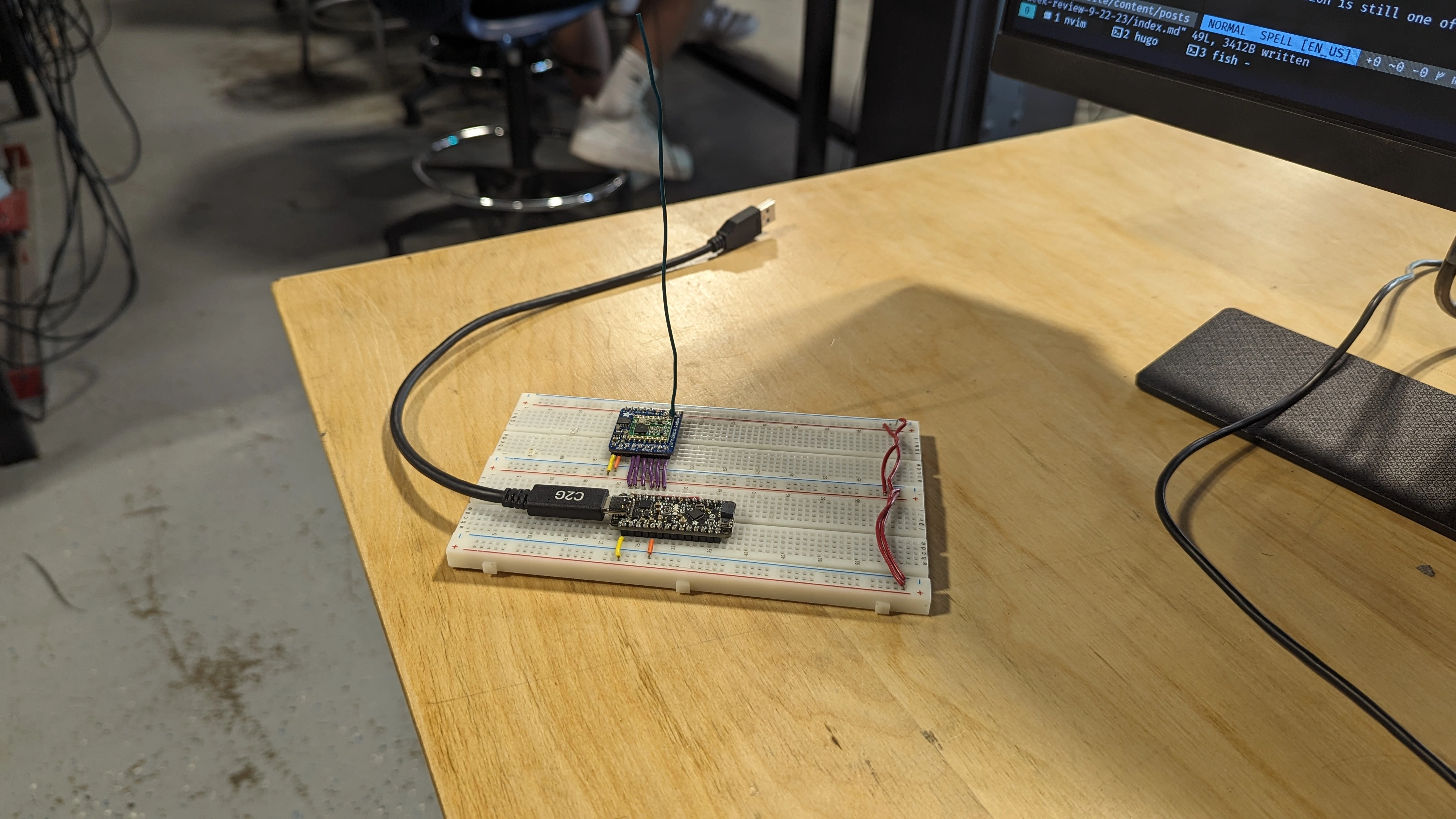
On Monday I started work by testing my last theory about why the packet radios might be acting up. I put them in 443 MHz mode and fashioned an antenna with the proper length for 433MHz. When I did a range test I found that it was able to go much farther and much more reliably, but it was not reliable enough to be used in the float.
We ordered new RFM69HCW Packet radios with professionally made 433MHz antennas so that I can test if the original radios were broken. We also ordered an Py ESP32-S2 so if the RFM69HCW radios do not meet our needs we can use WiFi with external antennas.
Working On Battery Holder
I was not able to continue work on the communication aspect of the float until the radios came in, so I pivoted to working on custom battery holders for the float. We want the batteries to be held more securely than last year, because our previous battery pack was a major point of failure.
I took inspiration from flummer’s battery box or AA cells on thingaverse for each of the individual cells, but I want to make the battery pack a cylinder that fits into the tube securely. I would have used the battery design for an individual cell that flummer made, but the battery clips used in the design are no longer being manufactured.
Battery Clips
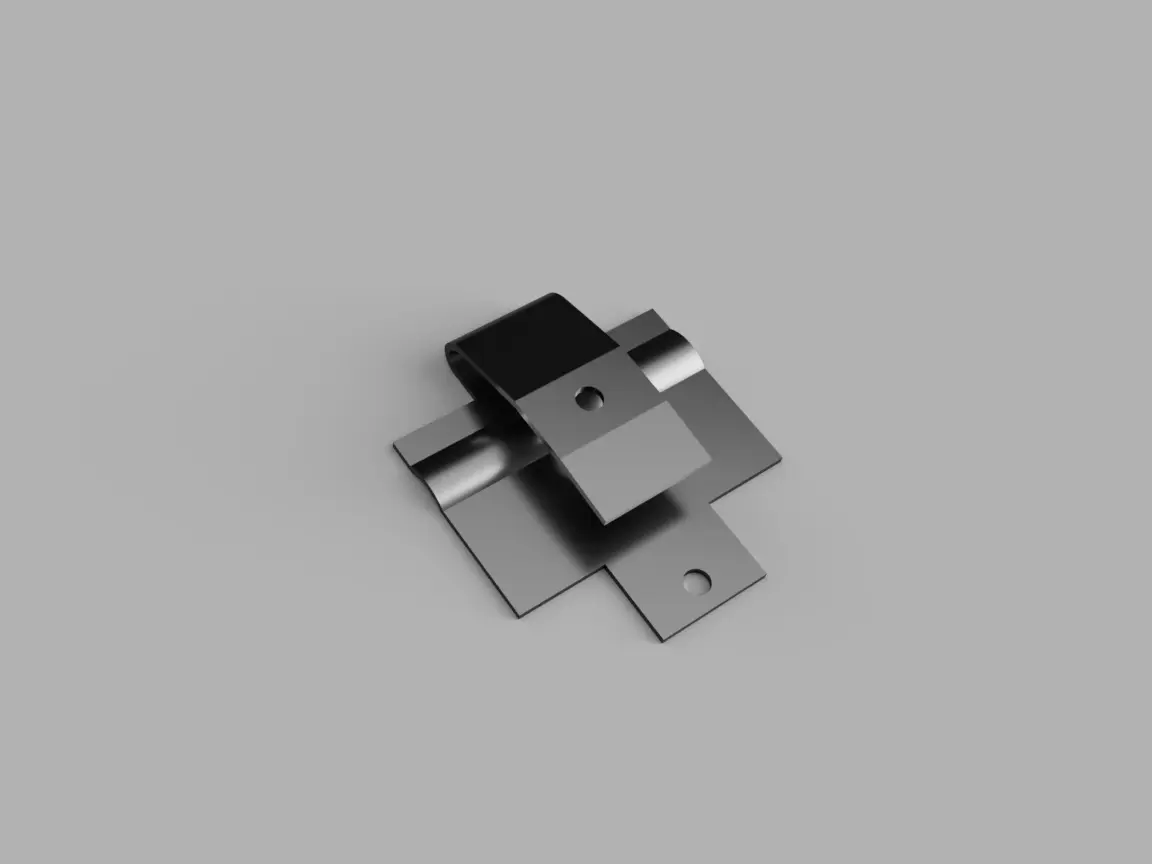
I chose the Keystone Electronics 5233 battery clips because I usually like the feel of products that use this style of battery clip, and they were in stock at DigiKey.
I could not find a CAD model on line for these battery clips so I starting creating my own using the datasheet they provided. I found that the datasheet did not have enough dimensions to fully model it, so I had to print it out and do some measuring.
Although the dimensions are likely not perfect I think my 3D model is accurate enough for this use case.
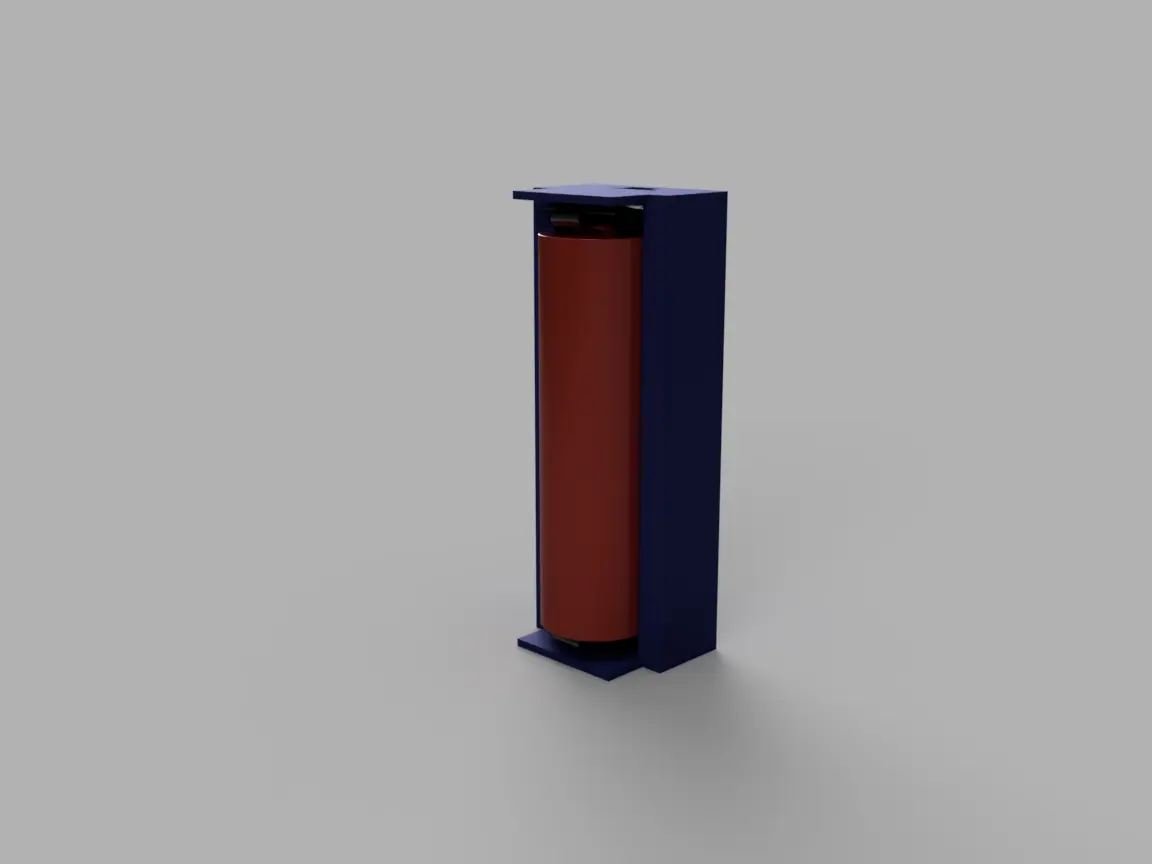
Modeling Single Cell
I want to have the individual cells fully modeled and tested before I try to make them into a cylinder. The tab of the battery clips with the hole for soildering is exposed through a small hole.
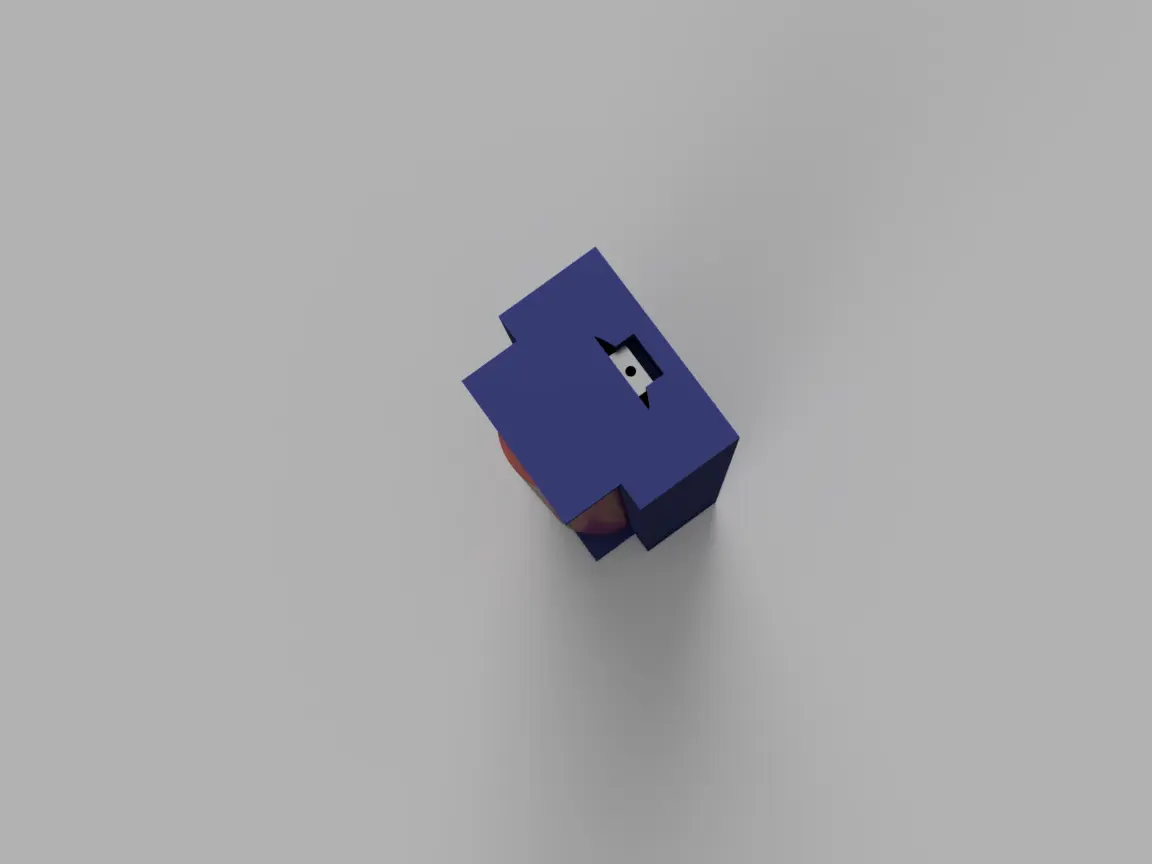
I plan on using epoxy to make a physical connection between the battery clip and the 3D printed case. I will make the electrical connection with soldier.
MATE ROV Update
It seems like the gamble we took in starting work on the float before we knew for certain it was going to be a mission task seems to have paid off. The special mission task got released by MATE and it is still the float.
This year the float needs to do two vertical profiles, collect data during the profiles, and transmit it back to the surface station where it will be graphed.
Plan for New Data Task
Having to get the data changes some aspects of the task. I am going to need to save the data and the time during each profile to be communicated back to the surface station when the float reaches the surface.
Once the data is communicated back to the station I will most likely use mattplotlib python library to visualize the data. I will have to add new tasks to the float timeline to account for the added complexity.